


例如,智慧农场可以利用自动化的地面与空中交通工具,依据丰富的地理位置定位(geolocation)传感器内容与分析学习,更有效率的指引地面作业。智能手术室将典型的导航技术带到手术台上,采用传感器融合的精密导引机械手臂,确保在所有情况下都能够精确的指引。在许多领域中,以动作为基础的传感器能让移动应用的价值得到加乘效果。
消费型惯性传感器应用已广泛用于智能手机中,但也造成使用者普遍认为其准确度差强人意;因此,迄今为止,在推动“可移动的物联网”(Internet of Moving Things;IoMT)概念上一直成效不彰。然而,新世代的高效能工业传感器能够支持分度(sub-gegree)指向精确度与精密的地理位置定位,同时提供必要的尺寸与成本效率,而且正开始致力于推动IoMT的发展。
工业系统中的智能感测驱动力
工业机械与制程中最有价值的进展就是专注于有形的系统级优点,而其通常会带来设计与实作上的挑战,另一方面也进而转化为新的解决方案与商业模式。目前有三种这一类型的系统级驱动力,都是为了追求资源效率、临界精确度以及提升安全性而设计。着眼于这些增强功能的应用分布在不同的产业,横跨空中/陆地/海洋、室内/室外、短期/长期以及人类/机械等方面,但无论如何,这些应用领域都仰赖于共同的属性;也就是精确度、可靠度、安全性以及智慧处理与分析,如表1中所列。
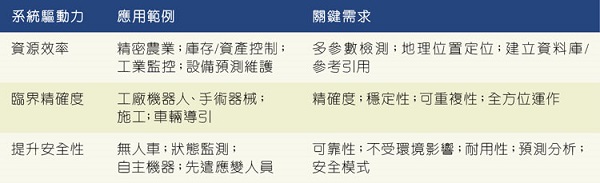
表1:在IoMT应用中,有价值系统属性转化为具挑战性的设计需求
具有多种类型的传感器成为目标应用设计任务的核心。然而,为了因应设计的系统复杂度,开发者必须在广泛变化的情况中谨慎考虑传感器的质量与耐用度。虽然有些产业可以基于方便性选择传感器(例如,利用手机中既有的传感器套件),但是其他产业会从头开始定义传感器套件,并依据精密度加以挑选,再以智慧化的方式进行整合,以实现完整可靠且涵盖所有预期的系统状态。
智慧感测
这些智能且可存取的系统藉由传感器丰富的情境架构,彻底改变了原本已经成熟的产业,让农业转型为智慧农业,基础设施升级为智能基础设施,城市过渡至智慧城市。当为了收集与环境相关的情境信息而部署更多的传感器时,对于要求跨平台与跨时间融合(例如,针对去年作物产量或交通状况与模式等基础架构,透过云端分析其如何随时间进展)的数据库管理与通讯(而非单纯传感器对传感器)也带来了新的复杂度,如图1所示。
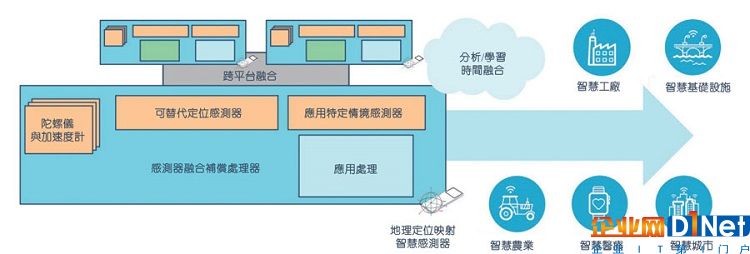
图1:新兴的工业需求结合情境架构,以及动作感测与多层融合
对于能够从设备与环境中可靠撷取信息的解决方案,成为这些创新企业最终效用与成长的主要衡量依据。准确度带动效率,并转化为必要的经济规模,同时也是安全与可靠作业的核心。虽然增加简单的特点对于最基本的传感器而言并不难,但是这种最小附加价值对于目标IoMT应用(其中的是/否、上/下或开/关等接口都会被更精密的解决方案取代)以及对传感器选择的附加影响而言其实都是不足的。
“动作”至关重要
在大多数情况下,物联网是处于运动状态的。即使它不在动态时(例如固定式工业安全摄影机),精准指向仍然至关重要,或者意识到出现不想要的动作(如窜改)也具有价值。以采用光学负载撷取作物影像的无人机而言,假如可以在严苛的飞行状况下维持精确的指向角度,就能更快提供较佳的结果,而且,如果光学数据能够精确地套用地理映像,还能够进行数据与趋势的历史比较。
智能交通工具(无论是地面、空中或是海上)越来越依赖GPS导航系统。然而,无论是蓄意或是自然的因素(建筑物、树木、隧道等等),GPS所受到的威胁也日益严重。如果选择精确的传感器,就能在中断运作期间以更多传感器进行可靠的航位推算(dead reckon)。表2列出将动作(M)加入IoMT中事件范例,显示动作对于应用效用的相关性。

表2:充份掌握与动作相关的知识或是相对缺乏,成为许多应用成功与否的关键
假如有特定的机会与方法能撷取设备或人的自然惯性,那么就能增强所撷取系统状态的知识重要性,而且可以恰当地融合到既有的情境信息中,如表3所示。

表3:对于物联网而言,定位感测提供极具价值的加乘效果
可靠且安全的IoMT节点
IoMT节点输出的有效性与价值最为仰赖的就是核心传感器的质量,以及其以高传真度撷取应用情境架构的能力。其次,对于持续的传感器校正/增强以及理想的传感器对传感器状态等动态(例如,在任意特定时间点,哪一个传感器最可靠)而言,融合处理是必要的。应用级的处理被分层至解决方案中,并且针对环境的细节(包括适当的限制条件)进行优化。虽然这些节点分别具有自主性,但在某些状况中会协同运作,例如在地面或空中集结成群的无人驾驶车辆等。这些情况中都会部署安全的通信链接,并且加强可靠的传输以及受到保护的独特身份等,如图2所示。

图2:彼此互连的安全传感器结合情境架构与位置
位于自主核心的传感器
就像人体一样,自主性IoMT节点仰赖多重感测输入,以实现独立移动所需要的意识,并为将其随机或甚至是混乱的事件进行优化,最终随着时间而予以改善。如表4中所注记的,由基本量测转换成控制或是自主性,都必须在传感器合并层级与嵌入式智慧方面提高精密度。由于这些节点具备高层次的互连与自主学习能力,它们正朝向人体与机器聚合的方向发展。

表4:从高质量传感器基础开始,提高整合度与智能,驱动自主性与人机聚合
无需基础架构的定位途径
GPS无所不在,除非卫星讯受阻或是停止运作。如果能顺利存取的话,可以实现极其精密的无线测距技术。如果能不受到干扰的话,磁场读数会一直存在着。惯性也可以独立自主作业。很显然的,惯性MEMS传感器存在自身的不足(漂移),但这些问题都是可以管控的,而且新世代的工业惯性测量单元(IMU)以小巧又具有成本效益的封装提供了前所未有的稳定度。
惯性MEMS组件采用标准的半导体制程、精密的封装以及整合方案,藉以直接感测、测量与解译其动作,它通常是以线性加速度(g)或是角度旋转(°/秒或速率)的形式呈现,如图3所示。因为几乎所有的理想应用都具有所谓的多重自由度(事实上,动作能在任何以及所有轴上发生,而设备在其动作中则相对不受限制),所以,g与速率的测量必须分别针对x、y与z轴进行撷取;或是在某些状况下称为滚动、俯仰与偏航轴。将这些结合起来,有时候可被称为6自由度惯性量测单元。

图3:用于判定精密动作的微机电结构
虽然经济因素很自然地驱使MEMS设计者采用最少的芯片空间,在每个轴(x、y、z)上撷取多重感测类型(g,速率),但是为了满足更具挑战性的工业感测规范,刻意采用更平衡设计性能的观点是有必要的。事实上,有些MEMS结构尝试以单一MEMS质量测量这六种模式。在检查这类方案进行高性能感测的有效性之前,很重要的一点是先了解即使必须使用MEMS组件撷取动作数据,但是,同样的组件是否能够排除会被解译为其他型式的错误动作,这点也是同等重要的。举例来说,当陀螺仪在量测角速率时,应该也要能够忽略加速度或是重力对于角速率量测的影响。试图以小巧结构进行各种测量的简单MEMS组件,很自然地(在设计上)也会受到其它干扰的误差来源所影响,因而无法分辨需要与不需要的动作。最终,这将会在导航或是指向应用中转化为噪声和误差。
对于在必要时提供所承诺的宝贵资源效率、安全增强或是临界精确度的IoMT来说,它所需要的精密度比目前移动装置中无所不在的简单传感器更高。针对性能的设计可转化为分别为每一种感测模式与每个感测轴进行设计,但必须以融合与整合的方向进行。最后,重要的一点是必须了解:针对性能的设计,并不需要以牺牲成本效益的设计做为代价。
特点或性能
有些应用可能只是意味着增加特点(以装置的姿势/方向切换模式)的实质价值,而这些特点透过简单的MEMS组件就能轻易地撷取。工业或是专业装置或许更易于测量价值,因为具备了多个方向精确度与次级之间的差异,或是更高一个数量级的精确位置辨认能力,而且又可以在高振动环境下运作。低阶与高阶传感器之间的性能差异并非十分微小,事实上其差异大到在挑选组件时必须确保经过谨慎的考虑。
终端应用将会决定所需的精确程度,而所挑选的传感器质量则将会决定是否能达成目标。表5比较两种解决方案,显示传感器挑选的重要性不仅只针对设计的过程,同时也影响设备的精密度。低精密度传感器如果只在有限的情况使用,而且应用装置具有容错能力,那么它或许是适用的;换个方式说,它适用于无关乎安全性、无性命攸关,或是相对精密度不需要太高即已足够的情况。虽然大部份的消费级传感器具有低噪声,而且可在良好条件下充份的运作,但并不适用于处在动态动作(包括振动)中的机械,因为在低性能惯性量测单元中无法将其所需要的部份从简单的线性加速度或是倾斜测量中分离出来。为了在工业环境中运作时具有优于一度以上的精确度,传感器挑选的重点在于能针对来自振动或温度影响造成的漂移进行拒斥的设计。像这样的高精密度传感器才能支持更大范围的预期应用状态,而且可以经历更长的使用时间。
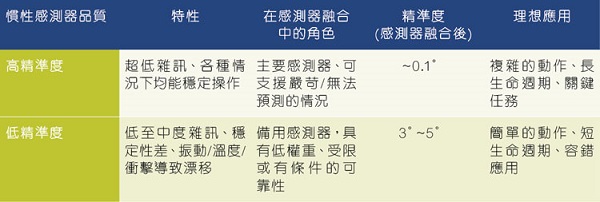
表5:传感器的质量驱动精确度与效用,而非由传感器融合所驱动
精密仪器的设计者通常最感兴趣的就是使用惯性量测单元,因为其输出是经过校正的g以及速率,而非行进的角度或是距离,因为此系统级信息是高度应用特定的,因此也成为了系统设计者(而非惯性传感器设计者)所专注的活动。在此所产生的课题在于辨识,例如惯性传感器规格表中的指向精确度。
在表6中,中阶工业组件的规格被拿来与手机中常见的典型消费型传感器做比较。值得一提的是更高阶的工业组件也是可以取得的,其规格较此处所列举的更优一个数量级。最低阶的消费组件提供的参数规格并不包括线性加速度效应、振动校正、角度随机游走等参数,以及其它实际上可能是工业应用中最大误差来源的参数。
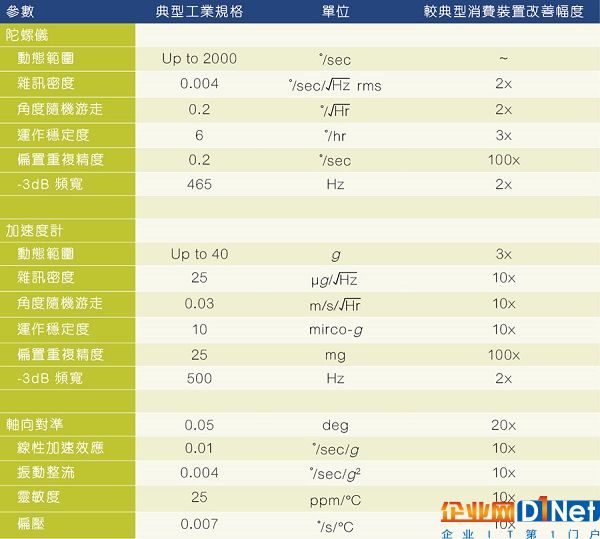
表6:工业MEMS组件提供所有已知潜在误差来源的特性,并且实现了较消费组件更高几个数量级的精密度
该工业传感器样本是针对在预期相对快速或是极端运动(2000°/s,40g)的方案中使用而设计的,而在这种状况下如果要实现最佳的讯号辨识,广大带宽的传感器输出也极为重要。运作期间偏移的最小漂移(运作稳定度)是希望减少对较大互补传感器的依赖,以修正性能。而在某些情况下,在无法提供后端系统滤波修正所需时间的应用中,启动漂移的最小化(重复性)也是极为重要的。低噪声加速度计被用来与陀螺仪搭配,协助分辨与修正任何与重力相关的漂移。
陀螺仪传感器实际上已经被设计成能够直接消除任何在组件偏移上重力事件(如振动、冲击、加速度、重力)的影响,以线性g的方式提供了实质上的优势,并且透过校正使温度漂移与校准获得了修正。如果没有校准修正,即便是整合到单芯片结构当中的典型多轴MEMS组件,也可能无法对准而成为误差预算主要原因。
虽然近年来噪声已经不再是判别传感器类型的主要因素,但像是线性g效应以及未校准之类的参数已经成为在任何应用中使噪声增加的来源,无论是透过芯片设计方案或是零件特定的校正来加以改善都是最耗费成本的,而非简单或是相对静态的动作判定。
传感器融合能解决传感器质量差的问题吗?
简单的说,不能。传感器融合是能够合并与管理传感器结合的滤波功能与算法,与环境、动作动力学以及应用状态有关。它可以提供确定性的校正像是温度补偿,而且能依据系统状态知识,管理从一个传感器到另一个传感器的协调管制。然而,它无法修正传感器中的原生缺陷。
在传感器融合设计中最具关键性的任务,首要就是开发应用状态的深度知识,藉以驱动其它的设计程序。接下来是针对特定应用装置挑选适当的传感器,这需要透过详细的分析以了解它们在总体任务不同阶段中的权重(相关性)。在行人定位推算的范例中,解决方案主要受到现有设备(例如智能手机中的嵌入式传感器)的限制,而非因为性能设计所导致。因为这个缘故而会变得相当仰赖GPS与其它现有的嵌入式惯性或磁性之类的传感器,其对于判定有效位置信息的任务只能够提供很少量的贡献。这在户外很自然地可以运作,但是在充满挑战性的城市环境或室内时,GPS无法使用,而其它可用传感器的质量不佳,于是就会留下一个很大的差距,或者换个方式说,就是位置信息质量的不确定性。虽然先进的滤波器以及算法通常会被用来合并这些传感器,因而不需要额外的传感器或是更高质量的传感器,但是想要实质上的填补不确定性差距,软件所能做到的其实也只有微乎其微,最终则会显著的降低回报位置的可信度,如图4所示。
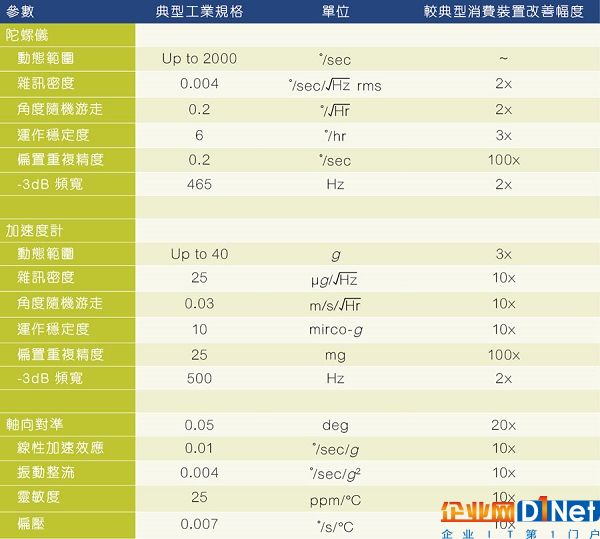
图4:应用级的精密度是由传感器质量决定,而非传感器融合的复杂度
与之形成鲜明对比的是,工业航位推算方案是针对具有系统定义的性能而设计的,并依特定的精确度需求指示而进行组件选择。很明显的,质量较佳的惯性传感器具有担任主要角色的资格,其它传感器则必须谨慎利用,以便降低不确定性差距。算法在概念上则更专注于传感器之间的优化权重、协调管制以及交叉相关,以及环境意识与实时动作动力学,而不只是在可靠的传感器读数之间外推/估计位置。
不论是哪一种情况,精确度都可以藉由质量改善的传感器而获得加强,虽然传感器过滤功能与算法是解决方案的重要部份,但它们本身无法消除因有限传感器覆盖范围造成的差距。
新型工业传感器具备了几乎等同于前一代用来导引飞弹的传感器性能。它利用了原本是为了车用装置可靠度与精密度而设想的传感器架构,以及经济上可行且能扩展的制程,使这些新世代工业传感器在性价比与性能尺寸比方面是完全独一无二的,如图5中所示。

图5:工业用六自由度IMU ADIS1647x与ADIS1646x,针对即使在复杂和动态的环境中也能够维持精密度而设计
精密的动作感测不再孤立于利基应用,而只能投资于其他昂贵的追踪解决方案。凭借采用迷你IMU尺寸的工业级精密度,物联网设计者现在可以透过整合高质量的动作感测并结合嵌入式情境感知以加乘其所提供的价值,从而驱动IoMT进展。








 京公网安备 11010502049343号
京公网安备 11010502049343号